| |
| |
Multi-Adapter CAN Support
SJA-1000 Chip Support
PITA Chip Support
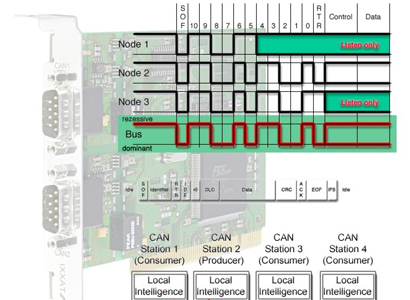
CAN Frame (11-Byte Mode)
CAN Frame (13-Byte Mode)
COM-To-CAN Interface
Core interface for CAN (Open) (Echtzeit-Level1)
Core interface for CAN (Open) (Echtzeit-Level2)
Priority controlled frame buffer management
True 32- and 64- bit mode
Hochgenaue Daten-TimeStamps (µsec) |
|
| Zusätzliche Werkzeuge |
 |
|
SYCOMM - CAN Analyzer
|
| Unterstützte Hardware |
| |
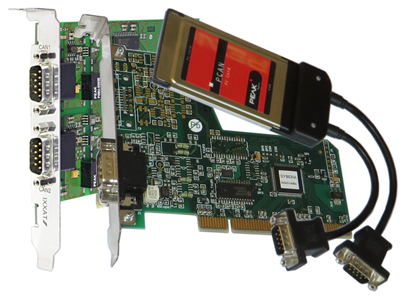
SJA1000 or PITA chips
PCI Adapters
PCIe (PCI Express) Adapter
ExpressCard/34
ExpressCard/54
PCMCIA Cardbus
|
 |
|
CAN (Open) Master für Windows |
|
Die Idee der Echtzeit Kommunikation für
unterschiedliche Transport Systeme, wie die serielle Kommunikation, Ethernet (TCP / IP) und CANBUS (...) wird mit den SYBERA
Transport Bibliotheken, den so genannten Echtzeit Cores realisiert. Alle Echtzeit Cores basieren auf der
X-Realtime Engine von Sybera. Die Cores ermöglichen sowohl Echtzeit-Level1 (das
Sammeln und Puffern von Daten in Echtzeit, ohne Datenverlust), sowie Echtzeit-Level2 (den zyklischen Funktionsbetrieb in
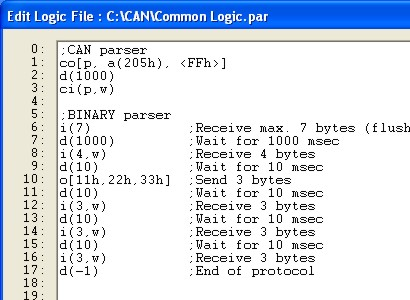
Echtzeit). Die Echtzeit CAN (Open) Bibliothek für Windows ermöglicht das Handling von Raw CAN
Frames in Echtzeit. Die Echtzeit Tasks können hierbei in der Applikation eingebettet werden. Der Datenaustausch erfolgt
über einen Shared-Memory Bereich. Die Echtzeit Cores benötigen lediglich einfache, passive Harware. Einer der
großen Vorteile ist die einstellbare Schedulingzeit von ein- und ausgehende Daten. Ein proprietäres
Core-Interface, als auch das standard Socket-Interface ist für die Entwicklung von Echtzeit Anwendungen verfügbar.
Ein Filter-Management legt die Transfer Richtung der CAN (Open) Frames fest (Core- oder COM- Interface) und ermöglicht
die gezielte Selektion einzelner Frames. Die verfügbaren Header-Dateien definieren alle, für die Bearbeitung des
Core-Interface und der Echtzeit erforderlichen Strukturen. Die Struktur-Elemente werden hierarchisch kombiniert. Der CAN
Realtime Core unterstützt als Standard PCI(e) und PCMCIA Adapter von PEAKSystem, IXXAT, EMS und SYBERA.
|
| CAN (Open) Master Funktionalität |
|
Beim Realtime Level 1 werden ein- und ausgehende
Daten mit Hilfe von RX- und TX- Ringbuffern entkoppelt und durch Vorwärts- und Rückwärts Indizierung
gesteuert. Zusätzliche bietet der Realtime Level 2 den zyklischen deterministischen Funktionsbetrieb und ermöglicht
somit die Umsetzung von Echtzeit Protokollen. Deshalb werden die CAN (Open) Frames im RAW-Format abgerufen. RAW bedeutet,
dass alle Daten des CAN (Open) Frames für den funktionalen Betrieb und zur Umsetzung von Protokollen zur Verfügung
stehen. Je nach PC-Hardware und Applikation sind Echtzeit-Zykluszeiten bis zu 50 usec realisierbar. Der CAN (Open) Core
ermöglicht den Betrieb mehrerer Adapter zur gleichen Zeit. Für jeden Adapter wird ein indizierter CAN (Open) Stack
erstellt.
|
| CAN (Open) Master Technologie |
|
Der Echtzeit CAN (Open) Core für Windows kann
mit einem passiven SJA1000 oder PITA Chip Adaptern (auch PCMCIA- und PCI-Express Adpater)
betrieben werden und wird als CAN-Treiber installiert. Bei der Installation wird Windows
automatisch nach einen PNP Gerätetreiber fragen und den CAN-Treiber installieren. SYBERA
verwendet das Verfahren (PDF) Dynamic Jitter
Compensation mit aktiver und passiver Kompensation innerhalb der Realtime Engine. Obwohl die X-Realtime Engine einen
native maximalen Jitter von ca.. 15 µsec (je nach Hardware Plattform) ermöglicht, kann mit diesem Verhalten der
Jitter durch die dynamische Kompensation unter 3 Mikrosekunden reduziert werden.
|
